




Ang pares ng meshing ng involute worm at involute helical gear ay malawakang ginagamit sa low-power transmission. Ang ganitong uri ng pares ng meshing ay medyo madaling idisenyo at gawin. Sa produksyon, kung ang katumpakan ng mga bahagi ay medyo mababa o ang mga kinakailangan para sa transmission ratio ay hindi masyadong mahigpit, ito rin ay isang mahusay na paraan ng pagpili.
Sa kasalukuyan, ang ganitong uri ng pares ng transmisyon ay hindi kasama sa pangkalahatang datos ng disenyo dahil ang teorya nito ay hindi pa ganap na ganap.
Ang ganitong uri ng meshing pair ay isang tipikal na point contact transmission pair. Mula sa mikroskopikong pananaw, malaki ang local stress at mababa ang efficiency. Mabuti na lang at maliit ang transmission torque at mababa ang mga kinakailangan para sa efficiency. Samakatuwid, medyo mabibili ito. Naiiwasan ng ganitong disenyo ang iba't ibang problemang umiiral sa paggawa at pag-assemble ng mga worm gear.
Pangunahing tinatalakay ng papel na ito ang representasyon ng ganitong uri ng pares ng kontak na gumagalaw sa normal na direksyon sa napakaliit na saklaw gamit ang isang animation sa direksyon ng paggalaw ng punto ng kontak.
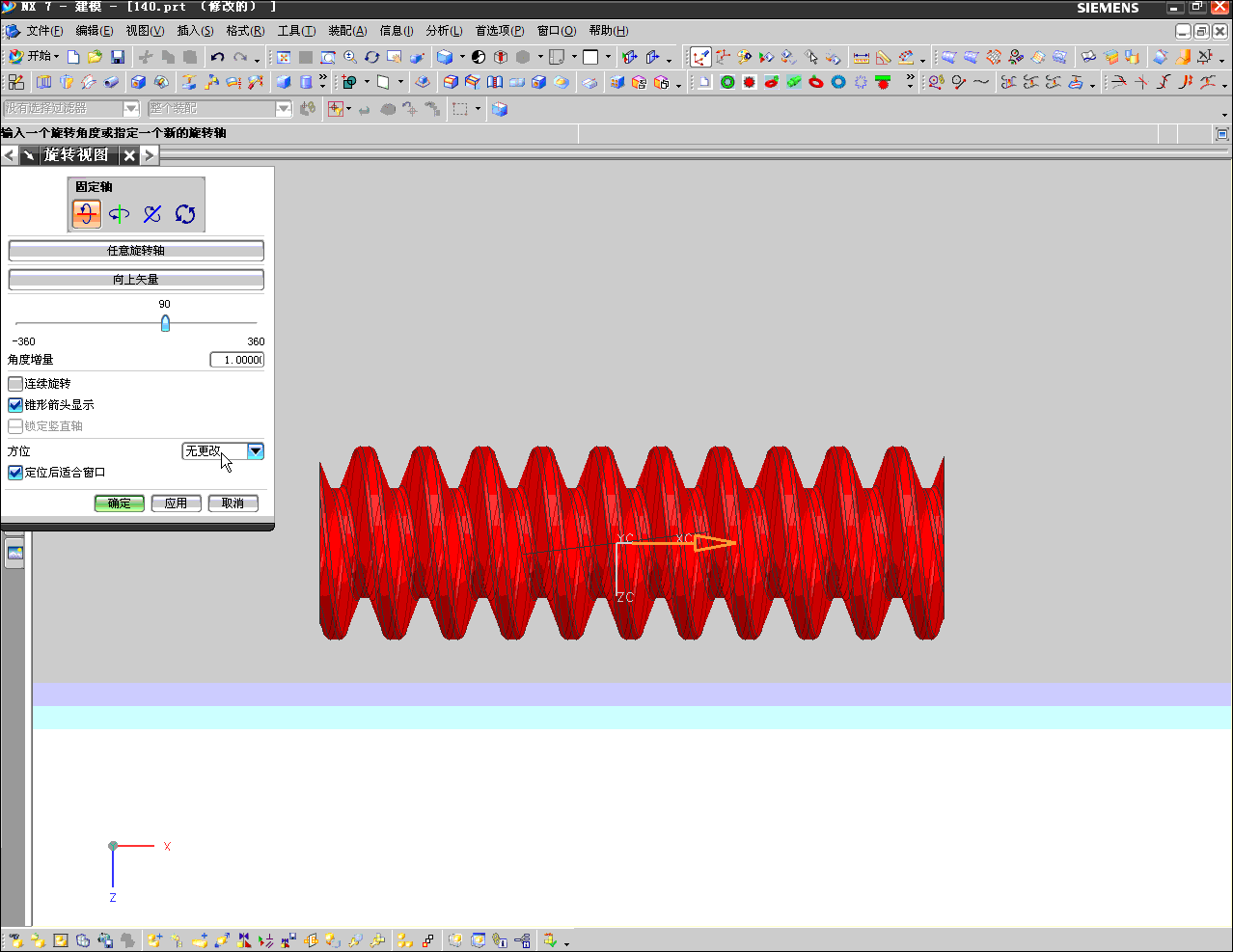
Gumawa ng patag sa gitnang bahagi ng pares ng meshing sa drawing, at iproseso ito upang maging translucent at contrasting ang kulay sa drawing, at pagkatapos ay hayaan itong paikutin nang tumataas ang anggulo ng bulate sa paligid ng patayong linya mula sa sentro ng gear patungo sa bulate, na matatagpuan sa posisyon ng normal na patag, gaya ng ipinapakita sa sumusunod na pigura:
Pagkatapos ng pagproseso, kunin ang pares ng transmisyon na kailangang suriin ang mga marka ng meshing upang maging kulay contrast, at kunin ang isa sa mga ito bilang translucent, upang ang paggalaw ng posisyon ng meshing sa buong proseso ng dynamic simulation ay malinaw na makita. Gaya ng ipinapakita sa ibaba:
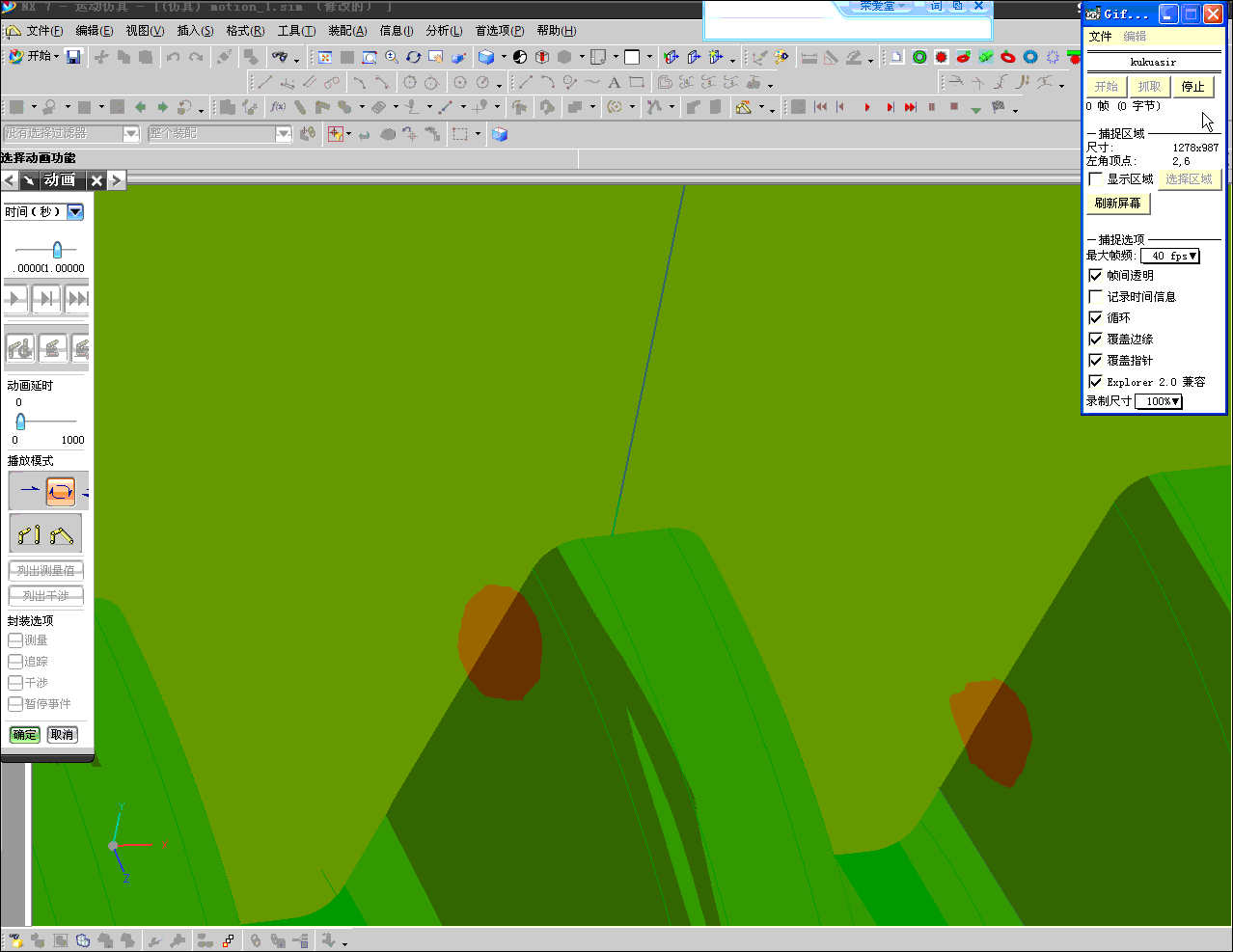
Habang gumagalaw ang meshing contact point na may halatang contrast color, makikita na dumadaan ito sa normal na sheet.
Mga rekord na kinalkula sa halimbawa sa itaas:
Paunang talaan ng pagkalkula ng involute worm na may helical gear
datos na ipinasok
Normal na modulus: 6 na bilog na may index ng bulate, diyametro: 5, bilang ng ulo ng bulate: 1, bilang ng ngipin ng helical gear: 40
Normal na anggulo ng presyon: 20 helical gear preselection helix angle: 6.89210257934639
Datos ng pagkalkula
Normal na modulus: anim
Modulus ng aksis: anim na raan at apat na trilyon at tatlong daan at animnapu't pitong bilyon dalawang daan at dalawampu't tatlong milyon labingsiyam na libo at tatlumpu't lima
Anggulo ng pagtaas ng sinulid: 6.89210257934639
Direksyon ng spiral: ang worm at helical gear ay nasa parehong direksyon
Distansya sa gitna ng sero na displacement: 14.5873444603807
Distansya sa gitna ng pares ng input transmission: 14.75
Katumbas na bilang ng mga ngipin ng tornilyo: 8.27311576399391
Anggulo ng presyon ng ehe ng bulate: 20.1339195068419
Radial deflection coefficient ng helical gear: dalawang libo pitong daan at labing-isa
Anggulo ng helix ng bulate: 83.1078974206537
Mga pangunahing parameter ng worm 83.10789742065361
Diametro ng pangunahing bulate: 6.2, diyametro ng menor de edad na bulate: 3.5, bilang ng ngipin ng bulate: 1
Normal na modulus ng bulate: 6, normal na anggulo ng presyon ng bulate: 20, diyametro ng bilog na nag-i-index ng bulate: 5
Koepisyent ng radial displacement ng bulate: 0 diameter ng base circle ng bulate: 1.56559093858108
Modyul ng dulo ng bulate: 5 modyul ng ehe ng bulate: anim na raan at apat na trilyon at tatlong daan at animnapu't pitong bilyon dalawang daan at dalawampu't tatlong milyon labingsiyam na libo at tatlumpu't lima
Anggulo ng presyon ng ehe ng bulate: 20.1339195068419 Anggulo ng presyon ng mukha ng dulo ng bulate: 71.752752179164
Normal na kapal ng ngipin ng bilog na pang-index ng bulate: 942477796076937 pagsukat ng taas ng ngipin ng bilog na pang-index ng bulate: anim
Anggulo ng pagtaas ng sinulid ng bilog ng pag-index ng bulate: 6.89210257934639 Anggulo ng helix ng bilog ng pag-index ng bulate: 83.1078974206537
Epektibong haba ng ngipin ng bulate: 25
Uod (axial) na tingga: 1.89867562790706
Mga pangunahing parameter ng helical gear
Pangunahing diyametro ng helical gear: 25.7 Pangunahing diyametro ng helical gear: 23 Bilang ng mga ngipin ng helical gear: 40
Normal na modulus ng helical gear: 6 helical gear normal na anggulo ng presyon: 20 helical gear modification coefficient: dalawang libo pitong daan at labing-isa
Diametro ng bilog na pang-index ng helical gear: 24.1746889207614 Diametro ng bilog na base ng helical gear: 22.69738911811
Module ng helical gear end face: 604367223019035 anggulo ng presyon ng helical gear end face: 20.1339195068419
Helical na anggulo ng helical gear indexing circle: 6.89210257934639 lapad ng helical gear: 10
Helical gear (axial) lead: 628.318530717958
Bilang ng mga ngipin sa karaniwang normal na linya ng helical gear: 5 nominal na halaga ng karaniwang normal na linya ng helical gear: 8.42519
Bilang ng mga ngipin sa karaniwang normal na linya ng helical gear: 6 nominal na halaga ng karaniwang normal na linya ng helical gear: 10.19647
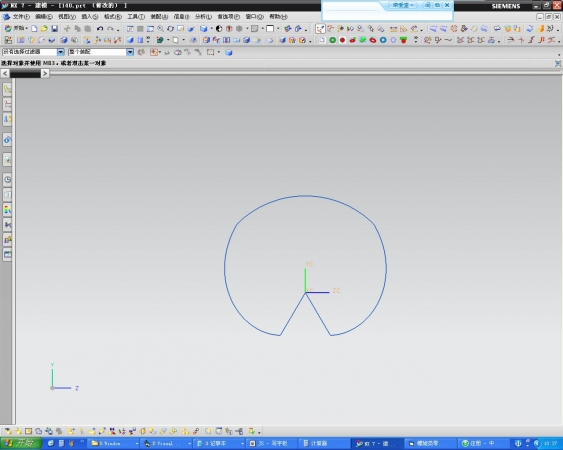
Diagram ng linya ng involute ng dulo ng mukha na ginagamit para sa pagmomodelo ng involute worm:
Oras ng pag-post: Hunyo-11-2022